PhysX isn’t taken (fully) into account here, only Chaos as we are taking into considerations UE5+ versions
Resources & tips
Profiles
Profiles can be created in a unlimited amount, so be free to use it at anytime a specific “thing” with a specific set of collisions rules exists more than once.
Collision rules
The Engine takes the lowest collision rule.
Example
If i got 2 object types, ObjectA and ObjectB. ObjectA wants to block ObjectB, but ObjectB ignores ObjectA : then both can overlap, because Ignore is lower than Block.
Custom collisions per instance(s)
Simple move
Like traces you can give a list of actors/components to ignore WHEN MOVING to any UPrimitiveComponent. This works on not-simulated physic objects.
For physics & traces
About
You can see everything (?) that the physic engine takes into account for filtering collisions with a body instance at CreateShapeFilterData (in PhysicsFiltering.h) called in FBodyInstance::BuildBodyFilterData.
it looks like the engine has a simulation filter (FPhysicsInterface::SetSimulationFilter) and a query filter (FPhysicsInterface::SetQueryFilter), used in FBodyInstance::UpdatePhysicsFilterData.
There is also EFilterFlags, used in FCollisionFilterData (HasFlag is interesting.)
For custom collision that the physic engine takes into account, there is multiple paths.
FMaskFilter MaskFilter
A custom mask (see FMaskFilter MaskFilter in the body instance). You can also access it from the UPrimitiveComponent
Max used bits of
FMaskFilterIt seems to be 6 if we check
NumExtraFilterBitsinEngineTypes.h.And the explanation sits in the comment you can see in
GetQueryData/GetSimDatainFPhysicsFilterBuilder. There is alsoNumCollisionChannelBitsandNumFilterDataFlagBits(which mentions the 32 limit).
Word3is anuint32, and the complete composition of it isOur custom 6 bits (called ExtraFilter) + 5 bits (for Body Channel, casted to ECollisionChannel) + 21 bits (other flags) = 32
Contact Modify
The flag is set in FPhysicsFilterBuilder.Word3 using ConditionalSetFlags with EPDF_ModifyContacts. It’s used in the various function FPhysicsFilterBuilder has.
bContactModificationin the body instanceThere is a mention about contact modification at
EFilterFlags::ModifyContacts, saying that the flag is “Unused” and “handled in Chaos callbacks”.
Meaning that setting bContactModification in the body instance doesn’t matter for the sim callback to be used.
In ISimCallbackObject you have OnContactModification_Internal from ContactModification_Internal. See post about it.
Use cases in source
The CMC seems to somehow use this system with
FCharacterMovementComponentAsyncCallbackby usingTSimCallbackObject, same forFChaosVehicleManagerusingFChaosVehicleManagerAsyncCallback.
ISimCallbackObjectmethods can be called on any thread.So be careful when using game thread only stuff. For example, don’t use
xxx__AssumesLockedmethods (at least directly without safe checks)
The Chaos::FCollisionContactModifier& Modifier received in OnContactModification_Internal contains a list of Constraints (Lot’s of details at FPBDCollisionConstraint declaration).
This list contains all the contact between all bodies in a scene. Not only Object1 and Object2 pair.
But in each contact you can get the Object1 and Object2 by using GetParticlePair (or by using the particle index 0 or 1 for some functions).
This list excludes sleeping bodies (even if in contact with something).
Contact points prediction
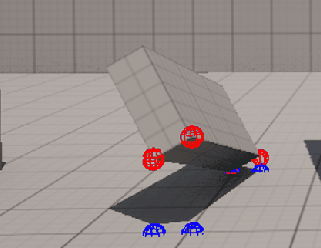
From the results I had after drawing the contact points each frame, the following frames shows that the points seems “predicted” if close enough to collide in the near future.
When using functions like GetWorldContactLocations you are getting the list of FManifoldPoints. A collision constraint can get up to 4 of these (use GetNumContacts to get the count).
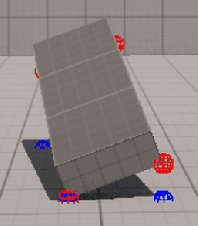
Drawing contact points (manifold points)
Simulated sphere
Simulated boxes
Code snippets
// minimal implementation of sim callback
struct FBPGCableBodySimCallbackInput : public Chaos::FSimCallbackInput
{
// MUST have
void Reset() {};
};
struct FBPGCableBodySimCallbackOutput : public Chaos::FSimCallbackOutput
{
// MUST have
void Reset() {};
};
// I don't know if ESimCallbackOptions::ContactModification is 100% required
class FBPGCableBodySimCallback : public Chaos::TSimCallbackObject<FBPGCableBodySimCallbackInput, FBPGCableBodySimCallbackOutput, Chaos::ESimCallbackOptions::ContactModification>
{
private:
// MUST have
virtual void OnPreSimulate_Internal() override {};
// What we want
virtual void OnContactModification_Internal(Chaos::FCollisionContactModifier& Modifier) override;
};
// body of OnContactModification_Internal
void FBPGCableBodySimCallback::OnContactModification_Internal(Chaos::FCollisionContactModifier& Modifier)
{
// Get Phys Solver and Scene
Chaos::FPhysicsSolverBase* BaseSolver = GetSolver();
Chaos::FPhysicsSolver* RealSolver = static_cast<Chaos::FPhysicsSolver*>(BaseSolver);
FPhysScene_Chaos* PhysScene = static_cast<FPhysScene_Chaos*>(RealSolver->PhysSceneHack);
// iterating all contacts
for (Chaos::FContactPairModifier& ContactPairModifier : Modifier)
{
// Example 0
// We get the 2 particles of this pair
Chaos::TVec2<Chaos::FGeometryParticleHandle*> Particles = ContactPairModifier.GetParticlePair();
// Example 1
// here no collisions will happen between the bodies
ContactPairModifier.Disable();
// Example 2
// Here we are drawing the location of all the contact points
// (can easily reach draw limit so watch out)
if (UWorld* World = PhysScene->GetOwningWorld())
{
for (int i = 0; i < ContactPairModifier.GetNumContacts(); ++i)
{
Chaos::FVec3 WorldPos0, WorldPos1;
ContactPairModifier.GetWorldContactLocations(i, WorldPos0, WorldPos1);
BPG_Debug::DrawDebugSphere(World, WorldPos0, 10, FColor::Red, 2, 1);
BPG_Debug::DrawDebugSphere(World, WorldPos1, 10, FColor::Blue, 2, 1);
}
}
// Example 3
// Get Body Instance from particle
FBodyInstance* BI0 = PhysScene->GetBodyInstanceFromProxy(Particles[0]->PhysicsProxy());
}
}
// init callback somewhere
if (UWorld* World = CapsuleComponent->GetWorld())
{
if (FPhysScene_Chaos* PhysScene = World->GetPhysicsScene())
{
SimCallback = PhysScene->GetSolver()->CreateAndRegisterSimCallbackObject_External<FBPGCableBodySimCallback>();
}
} CollisionEnabled in depth
From what I’ve found in the source code, there is an actual performance change depending on the ECollisionEnabled::Type value set on your component.
For more details about optimizing your physics scene see this article section
Full details:
- No Collision:
- Will not create any representation in the physics engine. Cannot be used for spatial queries (raycasts, sweeps, overlaps) or simulation (rigid body, constraints).
- Best performance possible (especially for moving objects)
- Query Only:
- Only used for spatial queries (raycasts, sweeps, and overlaps). Cannot be used for simulation (rigid body, constraints). Useful for character movement and things that do not need physical simulation.
- Performance gains by keeping data out of simulation tree.
- Physics Only:
- Only used for physics simulation (rigid body, constraints). Cannot be used for spatial queries (raycasts, sweeps, overlaps). Useful for jiggly bits on characters that do not need per bone detection.
- Performance gains by keeping data out of query tree
- Collision Enabled:
- Can be used for both spatial queries (raycasts, sweeps, overlaps) and simulation (rigid body, constraints).
Overlapping
Per actor ignore
You can use MoveIgnoreActors and MoveIgnoreComponents
Breakdown
When a primitive is moved, UPrimitiveComponent::MoveComponentImpl will get called.
near the end it will call UPrimitiveComponent::UpdateOverlaps which calls UPrimitiveComponent::UpdateOverlapsImpl.
This is where lots of stuff happens, including UPrimitiveComponent::BeginComponentOverlap and UPrimitiveComponent::EndComponentOverlap.
Inside these 2 functions other stuff happens including the call to the OnComponentBeginOverlap and OnComponentEndOverlap delegates. This is also where OverlappingComponents is updated
Overlap per bone
Enable bMultiBodyOverlap on the skeletal mesh should do the job, but its not the case.
A workaround is to do a overlap test for all SKMC bodies when a overlap happens between a primitive and a SKMC